
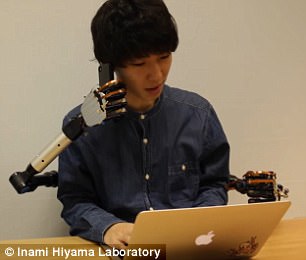
【網(wǎng)易智能訊 6月1日消息】這個(gè)機(jī)器人可以提供一只手,甚至兩只手。日本研究人員已經(jīng)發(fā)布了一副機(jī)器人手臂
,使用者在進(jìn)行復(fù)雜的任務(wù)時(shí)
,將其綁在背部,以幫助他們做一些人體無(wú)法完成的動(dòng)作。
這組機(jī)械臂叫做MetaLimbs,穿戴者的腳和膝蓋裝有彎曲傳感器,腳和膝蓋的運(yùn)動(dòng)將通過(guò)傳感器來(lái)驅(qū)動(dòng)機(jī)械臂。
MetaLimbs即“多臂交互變形”,是安裝到人體上的額外假肢。研究人員解釋說(shuō):“使用者身體上增添了兩個(gè)機(jī)械臂,并收集使用者腿、腳、甚至腳趾的全局運(yùn)動(dòng)數(shù)據(jù)?div id="d48novz" class="flower left">
!薄叭缓笏鼘⑦@些數(shù)據(jù)映射到
機(jī)械臂和的運(yùn)動(dòng)上
,向腳施加反作用力,并將反作用力映射到機(jī)械臂的觸摸傳感器上
?div id="d48novz" class="flower left">
!睓C(jī)械臂的末端不僅可以安裝機(jī)械手,還可以用其它裝置替代
,如爪
,焊接工具,油漆刷等
。
MetaLimbs將應(yīng)用在兩個(gè)公園里,公園中安裝了位置跟蹤系統(tǒng)和機(jī)械臂系統(tǒng)。跟蹤系統(tǒng)要求在佩戴者在腳趾和膝蓋上安裝光學(xué)跟蹤標(biāo)記,用于收集四肢的位置和旋轉(zhuǎn)數(shù)據(jù)
。

機(jī)械臂如何移動(dòng)取決于佩戴者腳的移動(dòng)方式。

跟蹤系統(tǒng)還包括襪子裝置,通過(guò)“彎曲傳感器”來(lái)檢測(cè)腳趾的位置
。當(dāng)佩戴者蜷曲腳趾時(shí),機(jī)械手也將蜷起
,以便從桌子上抓取物體或?qū)⒛澄飶囊粋€(gè)位置移動(dòng)到另一個(gè)位置
。

該團(tuán)隊(duì)還增加了傳感器,使用戶的腳能夠感覺(jué)到所抓取的東西。讓它們知道在正確的位置蜷曲腳趾并用機(jī)械手抓住它
。機(jī)械臂系統(tǒng)像背包一樣綁在佩戴者身上,且需佩戴者坐著時(shí)使用
。但是
,該團(tuán)隊(duì)也指出,佩戴者站立時(shí)也可以用它完成一些任務(wù)
。研究人員在視頻中說(shuō):“機(jī)械手抓著東西的同時(shí)
,你依然可以自由使用自己的手
。
機(jī)械臂可以針對(duì)具體情況進(jìn)行定制。它們會(huì)幫助你完成任務(wù)
,包括一些專業(yè)技能
。MetaLimbs通過(guò)賦予運(yùn)動(dòng)數(shù)據(jù)提供了易于操縱的機(jī)械臂。你可以同時(shí)用四個(gè)手臂做抓物體
、觸摸自己身體等動(dòng)作”
。
【英文來(lái)源:每日郵報(bào) 編譯:網(wǎng)易見(jiàn)外智能編譯平臺(tái) 審校:日月沉香】
化設(shè)備有限公司")
